Dense LiDAR Intensity Image Synthesis from RGB Images with LiDAR Novel View Synthesis
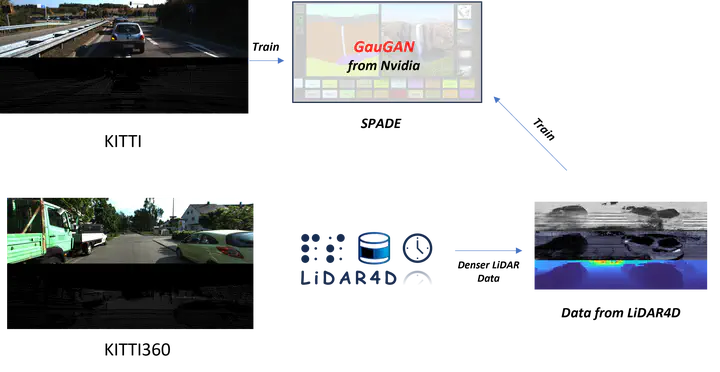 An overview of the project
An overview of the project
Advisors: Richard Marcus & Marc Stamminger
In this project, we trained Image translation model SPADE to generate LiDAR intensities in camera perspective conditioned on the RGB image from the camera. We utilize KITTI and KITTI-360 datasets for training the models.
We utilize LiDAR4D, a recent approach to LiDAR Novel View Synthesis, to generate dense LiDAR point cloud and use the projected intensities to train Image-to-Image translation models.